Part III - Various Discussions
10. Step, Carry and Stride
Stride = carry + step (vectors).
Step-line is a
product of step-out and rear-stretch-lines (pelvic
stretch plus rear-leg-line), and foot offset, and is the
part of the stride that can be controlled.
Aberrations and push-off angle don't affect the
step-line.
Carry-line changes as a consequence of
the other foot's previous step-line, foot offset and
foot angle, as well as the current step’s push-off
angle, aberrations, and pelvic stretch (and
straddle-line). So, distance and direction variations in
one foot are reflected by changes in the corresponding
carry-line for the other foot.
For the step and
carry lines, it doesn't matter that the foot is in the
air at one of the points, it's just assumed the foot is
planted at the reference spot, the measurement is taken,
and the foot resumes its travel path. Also, it doesn't
matter whether the path of the foot in the air ever
passes the start/stop position, it's still valid as a
standard reference because of the vector nature of the
measured distances.
The stride-line is dependent
on the step and carry-lines, and, so, varies as they
vary.
How each stride-line is changed when
turning depends on the foot that's used to make the
turn. For a left turn, the right stride must be longer
than the left under all conditions.
But, if the
right foot makes the left turn (the outside foot, an
internal rotation) the left carry is shortened, and so
the left stride-line is shortened (the left step-line
stays the same) and the total distance traveled for the
same number of strides is decreased. (The Wstr is also
increased.)
If the left foot makes the left turn
(the inside foot, an external rotation), the right carry
is lengthened, so the right stride-line is lengthened
(the right step-line stays the same) and the total
distance traveled for the same number of strides is
increased. (The Wstr is also decreased.)
So, if
two runners are identical in every way (including
cadence) but how they turn, the runner using the inside
foot and external rotations should beat the runner using
the outside foot and internal rotations.
11. Straddle-line, Straddle, Straddle Width,
Stride Width, Step Width, Walking Base and Walking
Straddle
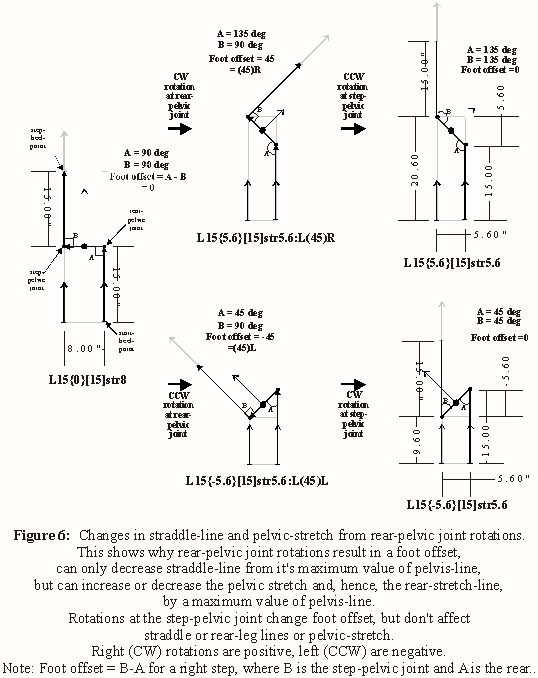
The straddle-line is the only
measurement independent of DOT changes. It can only be
changed by real or apparent rotation at the rear-pelvic
joint.
Straddle, straddle width, stride width,
step width and walking base are, as far as I can tell,
minor variations of two main definitions.
1) The
sum of the perpendicular distances between the points of
initial contact of each heel to the line of forward
progression
or,
2) The perpendicular
distance of the point of contact of the heel-edge to a
line connecting the appropriate points on the other
foot's adjacent two heel-contacts.
For #2, the
left stride width, for eg., is the perpendicular
distance of the contact point on the right heel-edge, to
a line connecting the corresponding points on the heels
of the appropriate two adjacent, left footfalls.
Walking straddle (Wstr) is the accurate version of (2),
with the measurement taken at the heel-points, not
heel-edges. This is an important measurement, since it's
also affected by how a person is turning over the
stride.
12. Aberrations
Aberrations
are everything that introduces foot-line rotations
and/or heel-point shifts while vaulting on the planted
foot, between the time of heel-contact of the current
step and the next heel-contact of the other foot. They
represent all relevant movements of the planted foot.
However, aberrations do not occur over the entire time
the foot is in contact with the ground, only between
sequential heel-contacts.
Part of the time that
the foot is in contact with the ground, when it's the
rear-foot in double stance, is not included. The
heel-contact of the forward foot takes the snapshot of
the rear-heel-point and foot-line positions, and
subsequent movements of these are irrelevant, since the
reference has shifted to the front foot. Aberrations are
totally isolated from the other parameters by the choice
of the time of the snapshot as heel-contact.
This
is a fundamental parameter. Aberrations are described by
a line description of the foot-line rotation, as well as
by the distance from last heel-point and angle from the
foot-line for heel-point shift.
Many (most)
people routinely balance and rotate on or near the ball
or toe of the planted foot when swinging the other foot
forward, or the front foot makes contact with the
heel-edge before the heel-point. Both of these are
aberrations. A spin turn is an aberration, but a step
turn isn't.
Aberrations probably occur in
virtually every step, such as when the heel-point of the
rear-foot is raised off the ground, but the toe is still
touching, when the front heel hits the ground. The
vertical part doesn't matter, but the path of the
heel-point during the rotation up is an arc, not
vertical line, so there is also a change in it's 2D
position. That matters.
The first straight line
over the step, the step-foot-line of the previous step,
is the start position for aberrations; and the second
straight line over the step, the start-foot-line of the
current step, is the stop position.
Unless
otherwise stated, in the general discussion it's assumed
there are no aberrations.
13. Vectors
A person walking
is a vector system. The Step Model is based on this
vector character, and all the lines are vectors (unless
otherwise noted), which may be projections of other
vectors onto the 2D plane of interest. All are derived
using the 4 minimum points of gait and foot-line.

14. Accuracy vs Precision
There are many references to the accuracy of
measurements.
The term accuracy, however, is
often confused with precision. The two are not the same.
All measurements have an accuracy and a precision,
and each value is usually described on a general scale
from low to high.
Precision can be considered to
be conforming exactly to a standard, and higher
precision means using smaller and smaller measurement
units. So, 3.0000" has a higher precision than 3.0".
Accuracy refers to closeness to the real value. The
ability to know or measure an actual real value doesn't
negate the fact there's only one real value for any
measured distance, with theoretically "infinite"
precision.
Higher accuracy means you're getting a
number that's closer to the real value, and one way it
can be done is using smaller measurement units, that is,
with higher precision. So, if the real value is
3.00000...", 3.000" has higher accuracy than 3.0", as
well as higher precision.
But, with a real value
of 3.00000...", 3.2000" has higher precision, but lower
accuracy, than 3.0" A value with higher precision can
have lower accuracy, and vice versa.
Accuracy is
affected in several other ways, unlike precision.
For eg., the foot (pitch) angle of the planted foot
has no effect on the total distance traveled for the
foot, so, if changes in the foot angle changes the
measured distance for step-line, that method of
measurement is not accurate, since it can't be trusted
to represent the real measurement for the factor of
interest alone, the total distance traveled for the
foot. Accurate values, like the total distance traveled
for the foot, can't vary with other, independent values,
like foot angle or shoe size (eg. when using
heel-edges), unless it’s defined as such.
This
variation with other, independent variables is a
consequence of the point of measurement not being on the
actual points of interest, the heel-points, but rather
shifted to the side to the heel-edges. Heel-edge
measures may be easier, but they're not accurate. They
include an extraneous vector component related to the
shoe's size, shape, position and the point chosen for
measurement. ie. the extra vector is from the heel-point
to the point on the heel-edge chosen for measurement.
(Note: These measurements could be used if this extra
vector was included.)
So, when referring to
values or techniques as inaccurate, I mean they can't
always be trusted to represent the real value alone.
They include one or more undefined, independent elements
(like part of the pelvis-line) or vary with other,
undefined independent variables (like foot angle or shoe
size).
An accurate measurement can contain more
than one element, and unknown or "theoretical" elements,
as long as it's defined as such.
The L/R line is
an accurate measurement of the vector sum of the
rear-leg line, pelvic stretch (theoretical), straddle
line (theoretical) and step-out line (other vector
"sets" also describe L/R). The step-out vector (sum of
the thigh and shank vectors, plus a small one from the
ankle to the heel-point) could be described as the
vector from the step-pelvic joint to the
step-heel-point, whether or not it's known exactly what
components comprise it.
All types of measurements
are important, as long as it's realized exactly what
they contain.
For this method, since the required
points and line are exactly defined, increasing
precision will also increase accuracy. This assumes the
4 points and line can be exactly identified every time.
So, the specific experimental methodology used may
introduce inaccuracy, even with greater precision.
15. Limb Dominance
Limb
dominance was always thought to be the main influence on
path deviation, through its effect on step length.
But, although differences in step length for the
left and right can't cause direction changes, limb
dominance can affect walking pattern by influencing any
or all of the 8 fundamental parameters. Each parameter
is dependent on a specific physical action, and
dominance would show as a standard influence on one or
more of these, in the same way as it influences step
length (which is a product of the parameters).
For a single person, the exact result of dominance on
gait may not be possible to predict every time, but
there should be general trends or patterns over a larger
group. This has to be discovered.
The study limb
dominance and how it affects the parameters, and overall
path characteristics, would be a large part of the
application to human tracking and SAR.
16. The Rotating Reference Grid
The recognition that the reference grid rotates
during walking is one of the most important aspects of
this method.
Measurements related to distance and
direction while walking have to be based on the
orientation of the skeletal frame, not a stationary, or
otherwise inappropriate, external reference plane or
line. The step-foot-line of the previous step (or
rear-leg-line, if there’s no foot-line) provides the
required initial angular reference, and the
rear-leg-line is used to orient the Step Model.
During a step, aberrations and push-off angle change the
orientation of the current Step Model, but foot angle
and foot offset do not.
Application of the
rotating grid to previous and current gait work may shed
light on many apparently anomalous or erratic results.
17. Balance
The fundamental
parameters don’t have anything to do with balance
directly, but the plane of the floor is used to study
both.
Variations in factors affecting balance
will likely lead to variations in the parameters. A COM
plot wrt each of the parameters will aid in measuring
the specific distance and direction changes due to COM
shifts.
This provides the opportunity to better
understand external factors which affect the COM, and
how they alter walking pattern (like a heavy back-pack
or other problem changing the control of the body COM).
Gait changes due to balance deviations could be
important for many areas of gait research, as well as
human tracking and SAR.
18. Movements Affecting the 8 Parameters
The 8 parameters are the basic measurements derived
from generalizing the human skeleton, wrt walking, into
the 4 minimum points of gait and foot-line.
But,
changes in these parameters aren’t as simple as the Step
Model implies, since lateral joint rotations and segment
length changes can come about from factors not
associated with those joints or segments.
Though
strictly 2D interpretation provides a very great deal of
info, the consideration of vertical co-ordinates allows
much more specific recognition of the physical processes
responsible for anomalies. The 3rd dimension is very
useful to highly detailed interpretation of the 2D data.
Apparent rotation at the pelvic joints, for eg.,
could be the result of several other movements, like
lateral ankle or knee rotation, or axial rotation (along
the thigh) at the pelvic joints (if the knee is flexed),
none of which involve any real lateral rotation at the
pelvic joint. Pelvic tilt, for eg., would be measured as
a foot offset and foot angle.
Detailed
investigation and categorization of the factors
affecting each parameter is necessary.
Previous
Next
Index
Forward
Part I
Part II
Part III
Part IV
Part V
Copyright
© 2008
|

