|
(C) Definitions
The term "line" refers to a vector quantity according to this measurement
system. This is to avoid conflicts with inaccurate, historical terms for
"lengths", such as step length. So, step-line is the accurate version of
step length.
All lines and angles are purely vertical projections
onto the 2D (step-) plane of interest.
All of the terms are derived
using the 4 minimum points of gait and foot-line.
=
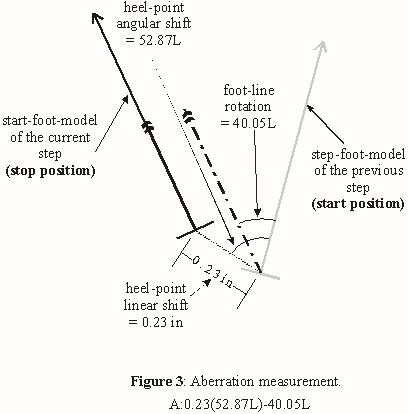
Aberration (A) - Anything that changes the location of
the heel-point and/or rotates the foot-line, after initial contact of the
heel and before heel-contact of the other foot's next step. They can be
generally described as movements of the planted foot. This is the 1st
direction change over the step, and it starts at heel-contact of the
previous step.
Aberration = A:10.25(12.3R)-23L = 10.25” heel-point
shift at 12.3 degR to start foot-line, and 23 degL foot-line rotation.
The first straight line
over the step, the step-foot-line of the previous step, is the start
position for aberrations; and the second straight line over the step, the
start-foot-line of the current step, is the stop position.
Aberrations do not occur over the entire time the foot is in contact with
the ground, only between sequential heel-contacts. Part of the time, the
second double stance after initial heel-contact, or terminal double stance,
is not included. The heel-contact of the forward foot takes the snapshot of
the rear-heel-point and foot-line position, the end-point for aberrations,
and subsequent movements of these are irrelevant, since the reference has
shifted to the front foot, and the next step.
Some rear-foot
movements after front heel-contact may influence the characteristics of an
aberration in the forward foot, but this would require a secondary analysis
to determine. The measurement system would only see the change in foot-line
and/or heel-point positions for the front foot, with no reference to cause.
Heel-point shifts are described by a linear distance from the last
heel-point and an angle with respect to the first foot-line; and foot-line
rotation (foot angle change) is described by an angle wrt the first
foot-line.
Slides, spins, rotations on the ball of the foot or toe, etc. are
aberrations, as is when the rear-heel-point is raised off the ground when
the step-heel contacts the ground, when pushing off the rear-toe. A spin
turn is an aberration, but a step turn isn't. Some aberrations are
controllable, others are not. A spin turn is controlled, a slide may or may
not be.
Also, when the step-heel touches the ground before the
step-heel-point, this is an aberration, even though it would be a
pathological gait for the heel-point to contact the ground at the same time.
This is why aberrations may be present in everyone's normal walking pattern.
The time snapshots used to define the parameters is chosen as
heel-contact, rather than heel-point contact, to separate this very complex
entity from the other, "simpler" parameters.
This is a fundamental
parameter.
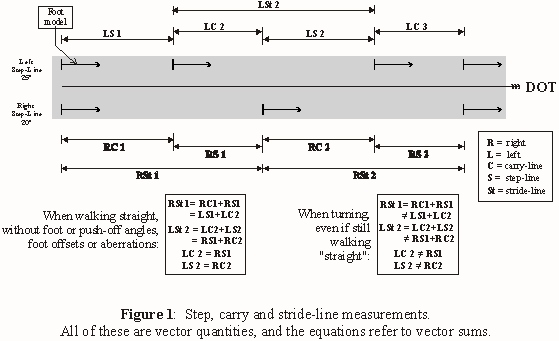
Carry-line (C) – For the left foot, the line from the
heel-point of the last left footfall to the reference-heel-point of the
current step (left foot directly adjacent to the planted right foot, at
straddle-line apart, and a line connecting the left and right heel points is
perpendicular to the rear-leg-line; the left foot is in the air, as for
step-line) after the body has been shifted for aberrations and push-off
angle. Stride = carry + step (vectors).
Carry-line is the part of the
stride that varies when turning, and is dependant on the other foot's last
pelvic-stretch, straddle, step-out and rear-leg-lines, foot offset and foot
angle, and the current step’s aberrations and push-off angle. So, distance
and direction variations in one foot are reflected by changes in the
corresponding carry-line for the other foot.
TThis line connects a real point and a theoretical
reference point.
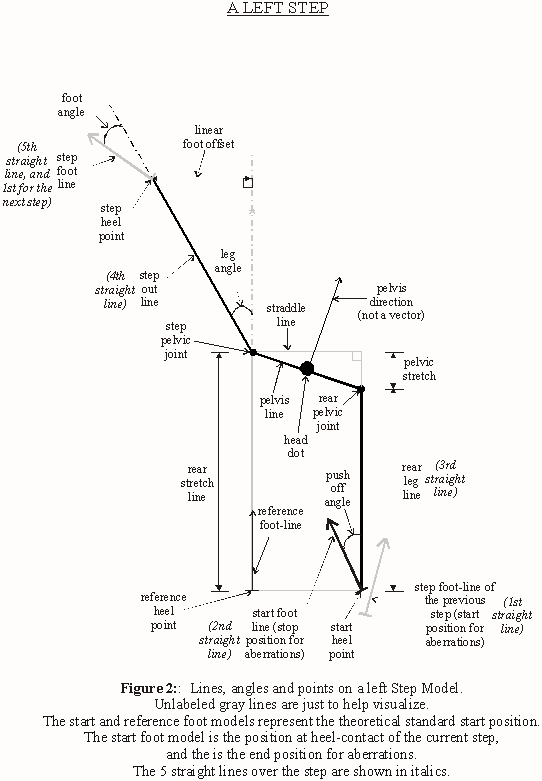
Foot angle (FA) – similar to the foot’s pitch or pitch
angle. The angle the foot-line makes with the step-out-line. This
measurement must include the designation “left” or “right” ; CCW or CW; or
“-“ or “+”. The rotation point for foot angle is the heel-point, and it’s
changed by real or apparent rotation along the 3D axis of the step-out-line,
at the step-pelvic, step-knee and/or step-ankle joints. With foot offset,
these are the 3rd and 4th direction changes over the step.
NOTE: This
is different from previous definitions of foot angle. Foot angle, in this
method, is measured with the step-out-line as the zero mark, but previous
definitions relied on the line of forward progression (or some other near
equivalent) as the reference line. So, foot-line rotations from both foot
offset and foot angle would have been seen as all from foot angle.
Foot angle = 10L = 10 deg left
When there's foot offset and foot
angle in the same step, the leg is rotated for the foot offset first and the
foot-line is held constant wrt the step-out-line, then the foot rotated for
the foot angle.
Reference to foot angle in general discussion is
often a simplified version.
I sometimes refer to foot angle changes
to indicate body DOT changes. Body DOT change is actually defined by the sum
of the foot and push-off angles. But, since this would needlessly complicate
the discussion, I assume that normal straight foot angle and push-off angles
are 0 deg, unless otherwise stated. Then, foot angle changes exactly
describe the relevant body DOT changes.
Straight foot angle refers to
the foot angle which equals the push-off angle in number, but is opposite in
rotation. This results in 0 deg body DOT change (foot offset and aberrations
could still cause a body DOT change in the same step).
So, if a
person steps out with a 6 deg CCW foot angle, and pushes off at an angle of
6 deg CW, body DOT change is 0 deg, and the straight foot angle was 6 deg
CCW. If a person steps out with 2 deg CCW foot angle, and pushes off at an
angle of 6 deg CW, body DOT change is 4 deg CW, and the straight foot angle
was 6 deg CCW for that step.
This is a fundamental parameter.
Foot-line (FL) - A line connecting the center of the
calcaneus and the second metatarsal head. The line must go through the
heel-point, so the heel-point position doesn’t move with foot line
rotations. Since it’s changes that are important, the exact position chosen
isn’t critical, as long as it goes through the heel-point and is the same
for all measurements.
The step-foot-line of the last step is the
first straight line for the current step, and is the start position for
aberration measurement. The foot-line after aberrations is the second
straight line, the 0 mark for push-off angle, and the stop position for
aberrations. The step-foot-line of the current step is the 5th straight
line, as well as the first for the next step.
The foot-line is a
vector quantity, showing the length and direction of the foot.
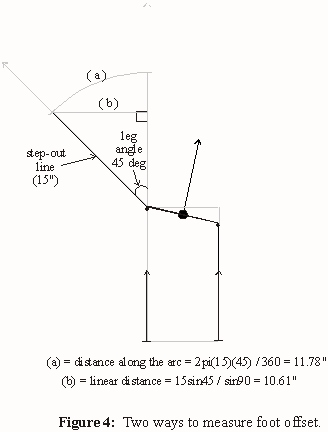
Foot offset (FO) – the distance, measured along the
step-out-arc or as a linear distance (see Fig 3), that the heel-point is
planted off of the straight line for that foot. This must include the
designation “left” or “right”; “CCW” or “CW”; or “-“ or “+”, and is changed
by real or apparent lateral rotations at the step and rear-pelvic joints,
with much smaller contributions from the step-knee and/or the step-ankle
joint. The rotation point for the measurement of foot offset is the
step-pelvic joint. With foot angle, these are the 3rd and 4th direction
changes over the step.
Foot offset = (10)L = 10 deg leg angle left
Foot offset due to pelvic joint rotations may be an important direction
control mechanism.
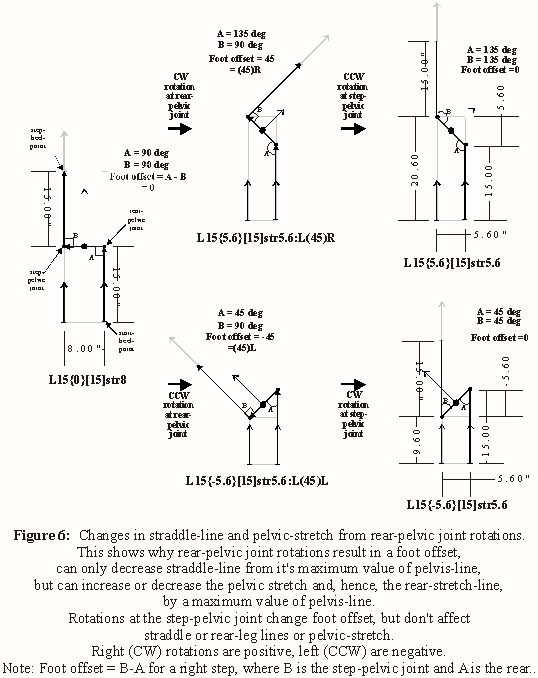
And, the Step Model implies that foot offset is
due to rotation only at the step-pelvic joint. But, foot offset is caused by
rotation at the rear-pelvic joint as well (besides the much smaller
contributions from the knee and ankle joints), since the pelvis and step-out
lines maintain a 90 deg relationship during the rotation of the pelvis-line.
So, a person could have a large foot offset with no rotation at the
step-pelvic joint. Rotation at the rear-pelvic joint not only causes a foot
offset, but also changes the straddle-line and pelvic-stretch.
From
Fig 6, the total contribution to foot offset from step- and rear-pelvic
joint rotations is defined by:
A - B = foot offset (leg angle) for a
left step and,
B - A = foot offset (leg angle) for a right step.
A is the rear-leg-line - pelvis-line angle, and B is the step-out-line -
pelvis-line angle. A negative value is a left (CCW) rotation. So, 0 foot
offset doesn't guarantee there's no rotation at the pelvic joints. When A=B,
pelvic joint rotation does not contribute to direction change via foot
offset. The normal, straight value of A and B is 90 deg.
Foot offset
has a corresponding leg angle, and, during the step-out-line rotation, the
foot-line remains fixed wrt the step-out-line.
And, there's an extra
angular deviation due to the side-step nature of the offset. For
L15{0}[15]R15{0}[15]str8:L(10)L:R10R (walking "straight"), the path shows an
extra shift of 2.8 degL because offset was used for direction changes in the
left foot and foot angles in the right.
It's much easier to use foot
offset in terms of degree leg angle. So, with 15" step-out-line, a value of
45 deg leg angle CCW (left) means an offset along the arc of approx. 11.78"
left, or a linear offset of approx. 10.61". So, this is designated as (45)L,
rather than by the linear or arc length values.
This is a fundamental parameter.
Head-dot - a dot at the center of the pelvis line. It
doesn't represent the real position of the head at any time, and the actual
location of the head has no effect on the position of the head-dot. It's
mainly to help visualize.
Heel-point (HP) – the
point of contact with the ground if we had peg legs that went to points. The
point that wouldn’t move if you spun around on the heel of one foot. The
foot line must go through the heel-point. Relevant distance measurements
that do not begin and end at a heel-point aren't accurate measures of total
distance traveled. The heel-point pattern exactly defines direction and
total distance traveled for each foot.
Leg angle (LgA)
– when the leg is extended to plant the foot at heel-contact, the angle the
step-out-line makes with an extension of the rear-stretch-line (actually the
rear-leg-line, but any line parallel to it can also be used). This must
include the designation “left” or “right” ;CCW or CW; or “-“ or “+”, and is
changed by real or apparent lateral rotations at the step and rear-pelvic
joints, with much smaller contributions from the step-knee and/or the
step-ankle joint. The rotation point for the measurement of leg angle (foot
offset) is the step-pelvic joint.
Foot offset is usually expressed as
deg leg angle. Foot offset = (10)L = 10 deg leg angle left
Any foot offset has a corresponding
leg angle, and when the person balances onto that foot to take the next
step, the body DOT is changed by the amount of, and in the direction of, the
leg angle. ie. the new body DOT, before foot angle rotation, is parallel to
the step-out-line.
Leg angle can be calculated from the step-out-line
and foot offset values (see foot offset, above).
L/R (R/L)-line (L/R or R/L) - Line from the left (right)
start-heel-point to the next right (left) step-heel-point. The first letter
designates the rear foot.
A product of 4 distance elements (rear-leg,
straddle and step-out lines and pelvic-stretch) and one direction element
(foot offset). This is what much current literature calls step length. It's
not an accurate measurement of the distance traveled by the foot over the
step, but is still very useful, since it varies with foot offset, but not
foot angle, push-off angle or aberrations.
The vector representation
of L/R-line would be equivalent to step-line, except L/R-line also contains
the straddle-line (which represents a perpendicular shift of the
step-out-line wrt the rear-leg-line, see Fig.7).
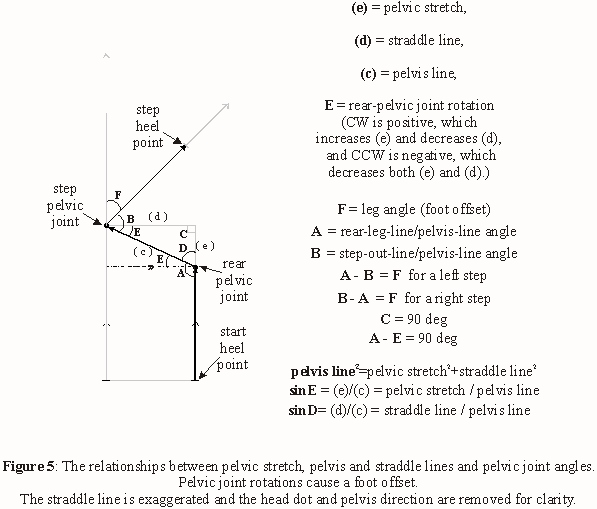
Pelvic-stretch (PS) - Line from the rear-pelvic joint to
the point of connection of the straddle-line with an extension of the
rear-leg-line. This is only changed by real or apparent rotations at the
rear-pelvic joint.
It can be + or -, based on it's affect on
rear-stretch-line. Rear-stretch-line = pelvic stretch + rear-leg-line. For a
step with the left foot, CW rotation at the rear-pelvic joint gives "+"
pelvic-stretch and increases the rear-stretch-line, and CCW gives "-", which
decreases rear-stretch-line.
Pelvic-stretch and straddle-line are the
sides of a right triangle, with the pelvis-line as hypotenuse.
This is a fundamental parameter.
Pelvis direction - Arrow starting on the head dot, and
in the center of, and perpendicular to, the pelvis-line. This is not a
vector and does not show a DOT, but shows the direction the front of the
pelvis is facing.
Within one step, pelvis direction can be changed by
aberrations, push-off angle and/or real or apparent rotation at the
rear-pelvic joint. Between steps, of course, it's potentially affected by
all 4 of the direction parameters, but none of the linear parameters (ie.
wrt direction, not location).
Pelvis-line (PL) - line connecting the centers of
rotation of the pelvic joints. The pelvis-line is the maximum value for
straddle-line, and is the hypotenuse of a right triangle, with
pelvic-stretch and straddle-line as the sides.
Push-off angle (PO) – The angle between the
start-foot-line and the rear-leg-line. The start-foot-line is the zero mark.
This is the 2nd direction change over the step, and is affected by variation
in muscle action in the leg and foot when pushing off the planted foot, as
well as by path specifics (momentum, etc.) prior to the heel-contact.
Push-off angle = <10>L = 10 deg left
This is a fundamental
parameter.
Rear-leg-line (RL) - Line from the start-heel-point to
the rear-pelvic joint. This is the equivalent of the step-out-line, but for
the rear foot, as far as the 3 vector components: 1) the rear-thigh, 2) the
rear-shank, 3) a vector connecting the center of the rear-ankle joint with
the start-heel-point.
An arrow from the start-heel-point to
rear-pelvic joint shows the straight line forward at heel contact, and is
the reference line for initial orientation of the Step Model. It's also
related to step-out-line due to the physical connection through the body.
When viewed from the side, a person in double stance forms a
pseudo-triangle, through the pelvis-line. (see step-out-line, below).
The rear-leg-line could also be considered the "push-off-line".
This is a fundamental parameter.
Rear-stretch-line (RSL) – Line from the
reference-heel-point to the step-pelvic joint.
Since
rear-stretch-line is equivalent to the vector sum of the rear-leg-line and
pelvic-stretch, the rotational relationship between the rear-leg components
is relevant. So real or apparent rotations at the rear-pelvic joint, the
rear-knee joint and/or the rear-ankle joint change rear-stretch-line.
Rear-stretch-line = pelvic-stretch + rear-leg-line (linear and vector)
Rear-stretch-line + step-out-line = step-line (vectors).
Step-line (S) – For the left foot's step, the line from
the reference-heel-point of the left foot (when it’s directly adjacent to
the planted right foot, at straddle-line apart, and a line connecting the
right and left heel-points is perpendicular to the rear-leg-line, left foot
is in the air), to the heel-point of the next left footfall. It's a product
of 3 distance elements (rear-leg and step-out lines and pelvic stretch) and
one direction element (foot-offset).
Step-line = step-out-line +
rear-stretch-line (vectors).
Foot and push-off angles and aberrations
have no affect on step-line. If there's a foot offset, the step-line will be
less than step-out + rear-stretch lengths, because it's a vector, not
linear, sum.
This connects a theoretical reference point and a real
point.
Step-out-line (SO) – Line from the step-pelvic joint to
the step-heel-point. The start of this line, the step-pelvic joint, is one
of the rotation points for foot offsets. The step-out-line is the 4th
straight line forward over a step, and is the sum of 3 vector quantities; 1)
step-thigh, 2) step-shank, and 3) a vector connecting the center of the
step-ankle joint with the step-heel-point.
Step-out-line +
rear-stretch-line = step-line (vectors).
When there is foot offset
(leg angle), the step-out-line shows the new straight line when the person
balances on that foot.
Step-out-line is changed by appropriate
rotation at the step-pelvic joint, the step-knee joint, and/or the
step-ankle joint.
This is a fundamental parameter.
Step-out-arc - the arc described by the step-heel-point,
when the leg is extended at the instant of contact, and the step-foot is
moved left and right. The rotation point for the step-out arc is the
step-pelvic joint. The radius of the step-out arc is the step-out-line. (see
also, foot offset).
Step-plane - the 2D plane of the Step Model, which must
include the start and step-heel-points, but is otherwise arbitrary. All the
lines and points in the Step Model are projections onto the step-plane,
which is usually the flat floor, but can be any 2D plane.
The
orientations of sequential step-planes show effects of terrain and other
vertical factors.
Adjacent step-planes are related since the
step-heel-point from the current plane is the same as the start-heel-point
in the next one.
Straddle-line (str) – Line perpendicular to the
rear-leg-line, connecting the step-pelvic joint with an extension of the
rear-leg-line. This value is constant with angular changes to the body DOT.
Real or apparent rotation at the rear-pelvic joint is the only thing that
affects the straddle-line, and this rotation also changes the pelvic-stretch
and induces a foot offset.
The maximum value for straddle-line is the
pelvis-line. The straddle-line and pelvic-stretch are the sides of a right
triangle, with the pelvis-line as the hypotenuse.
When the subject is
walking straight with no aberrations, foot or push-off angles or foot
offsets, straddle-line = walking-straddle, but this is the only condition
where that's true.
This is a fundamental parameter.
Stride-line (St) – Line from the heel-point on one foot
to the heel-point on the next footfall of the same foot. This connects two
real points.
Stride-line between the current and next step is a
product of 9 distance elements (current and next step's: rear-leg, straddle
and step-out lines and pelvic-stretch; and aberrations from the next step)
and 5 direction elements (current step's foot offset, foot angle; and foot
offset, push-off angle; and aberrations from the next step).
Stride-line = carry-line + step-line (vectors).
If there are any body
DOT changes, the stride-line will be less than step + carry lines, because
it's a vector, not linear, sum.
Walking-straddle (Wstr) - The perpendicular distance
between a line joining the two corresponding heel-points of interest and the
other foot's heel-point within that stride. Almost the same as walking base,
but the measurement is to the heel-points, rather than the points of initial
contact of the heels.
Walking-straddle is a product of the same 14
elements as stride-line. Left and right Wstr aren't the same if there are
asymmetric turns or straddle-line differences in adjacent steps.
In
order to compare walking-straddle and walking base, since the distance from
heel-edge to heel-point is about 1.5" for an adult, walking-straddle should
be about 3" longer than walking base. Literature walking base measurements
suggest an average of 3", so an average walking-straddle should be about 6".
Previous
Next
Index
Forward
Part I Part II
Part III
Part IV
Part V
Copyright
© 2008
|

